叉车防撞如何实现的
转载 2021-04-23 08:45 北京华星智控 来源:北京华星智控华星智控叉车防撞系统方案是基于UWBLOC无线脉冲测距技术实现的人车防撞解决方案,这个方案具体如何实现听我慢慢讲完。
首先我来说下它的基本底层逻辑原理,无线脉冲是一种电磁波,脉冲在空气中飞行的速度等于光速,通过光速乘以时间可以获得距离,这个是中学就知道的算术问题。距离=速度*时间。
我们通过无线脉冲在空气中飞行的时间算出距离。
人员需要佩戴一种脉冲信号发射设备,我们把它叫做防撞标签,人员佩戴的防撞标签会按照是事先设置好的频率发射信号脉冲,信号脉冲发出去以后会被安装在车上的信号接收设备接收到,车上安装的脉冲接收装置我们把它叫做防撞基站,如下图所示。防撞基站接收到标签发出的脉冲后会计算出它自己和防撞标签的距离。
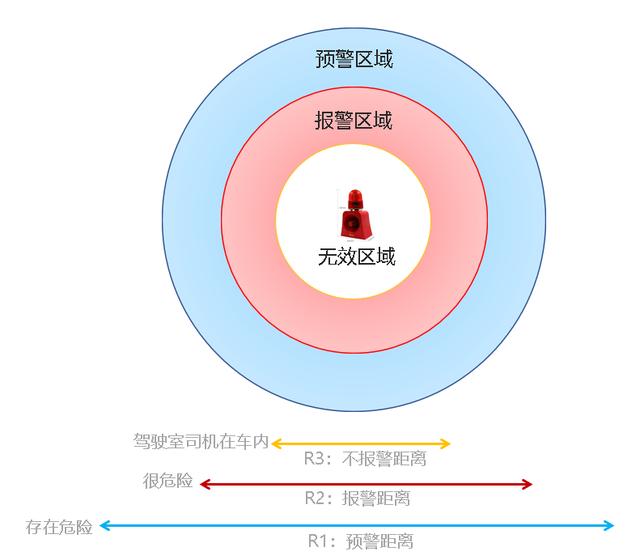
有了这个防撞基站和防撞标签的距离后我们就可以实现人车防撞的功能了,我们可以提前设置好一个预计距离,一个防撞距离,当人员和车辆的位置小于我们提前设置好的预警距离或者防撞距离,那么我们就需要提醒人员和驾驶车辆的司机注意了,防撞基站可以外接一个声光报警器,当人员和车辆距离小于报警距离,可以接通声光报警器报警,声光可以提醒司机和人员注意避免危险。

这个防撞系统同样适用于车辆和车辆之间的防碰撞,原理在这里我就不重复介绍了和上面人车防撞原理一模一样。

人员佩戴的标签具有以下几种形式,可以是固定在安全帽上,也可以佩戴在手上或者佩戴在胸前,你可以根据不同的应用场景选择不同的佩戴形式。

补充说明下防撞基站的内部结构,实时的人车或者车车距离可以通过485输出,内部有2个继电器,分别对应2个常开和2个常闭触点,通过继电器的开合来控制声光报警器,就这么个原理。
下面我们分别用几个动画画面来使你更容易理解这种防撞系统方案,如下所示为车车防撞示意图动画。
下图所示为人车防撞动画示意图。



如果你关心这种人车防撞作用距离,我来告诉你,人车防撞感应距离大于100米,车车感应距离大于500米,这样的距离应该是满足大多数应用场景的。最后我们还是来看看一个实际的安装照片吧,不然你可能怀疑我没做个这种项目。

相关资讯
更多- 轮毂内置电机加速量产:芬兰Donut Lab获€2500万种子轮融资,押注去传动化电动平台
- 人机交互的兴起:下一代仓库安全
- 独轮安防机器人走向量产:Rollo Robotics 获 370 万欧元种子前融资
- 世界最小的可编程、全自主机器人在美问世
- Sunflower Labs 获1600万美元B轮融资,致力把无人机安防从概念推向规模化落地
- 从“最后一公里”到“最后几分钟”:沃尔玛无人机配送扩展至亚特兰大都市圈
- 巴斯夫携手Mobile Easykey打造管理2600台工业车辆车队管理标杆
- 埃隆·马斯克称人工智能和机器人技术将使金钱“变得无关紧要”
- 美媒:是时候在美国复制中国的机器人战略了!
- 从摄像头到“数据神经系统”--Axis视频智能加速物流数字化